AnyCar to Anywhere Learning Universal Dynamics Model for Agile and Adaptive Mobility
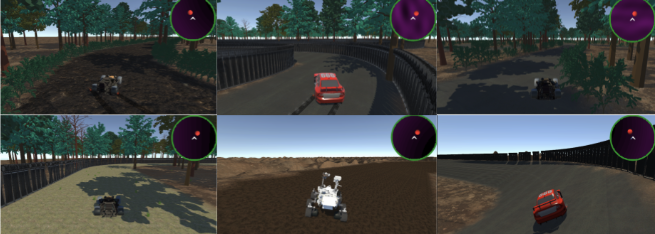 Image credit: Unsplash
Image credit: Unsplash
Abstract
Recent works in the robot learning community have successfully introduced generalist models capable of controlling various robot embodiments across a wide range of tasks, such as navigation and locomotion. However, achieving agile control, which pushes the limits of robotic performance, still relies on specialist models that require extensive parameter tuning. To leverage generalist-model adaptability and flexibility while achieving specialist-level agility, we propose AnyCar, a transformer-based generalist dynamics model designed for agile control of various wheeled robots. To collect training data, we unify multiple simulators and leverage different physics backends to simulate vehicles with diverse sizes, scales, and physical properties across various terrains. With robust training and real-world fine-tuning, our model enables precise adaptation to different vehicles, even in the wild and under large state estimation errors. In real-world experiments, AnyCar shows both few-shot and zero-shot generalization across a wide range of vehicles and environments, where our model, combined with a sampling-based MPC, outperforms specialist models by up to 54%. These results represent a key step toward building a foundation model for agile wheeled robot control. We will also open-source our framework to support further research.