 Image credit: Unsplash
Image credit: Unsplash
Abstract
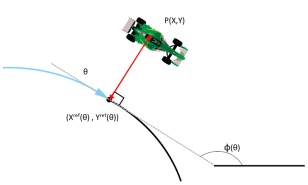
The paper presents a strategy for the control of an autonomous racing car on a pre-mapped track. Using a dynamic model of the vehicle, the optimal racing line is computed, taking track boundaries into account. With the optimal racing line as a reference, a local nonlinear model predictive controller (NMPC) is proposed, which takes into account multiple local objectives like making more progress along the race line, avoiding collision with opponent vehicles, and use of drafting to achieve more progress.
Type
Publication
Accepted at ‘Opportunities and Challenges in Autonomous Racing worskshop, ICRA 2021’